init
This commit is contained in:
@@ -1,3 +1,8 @@
|
||||
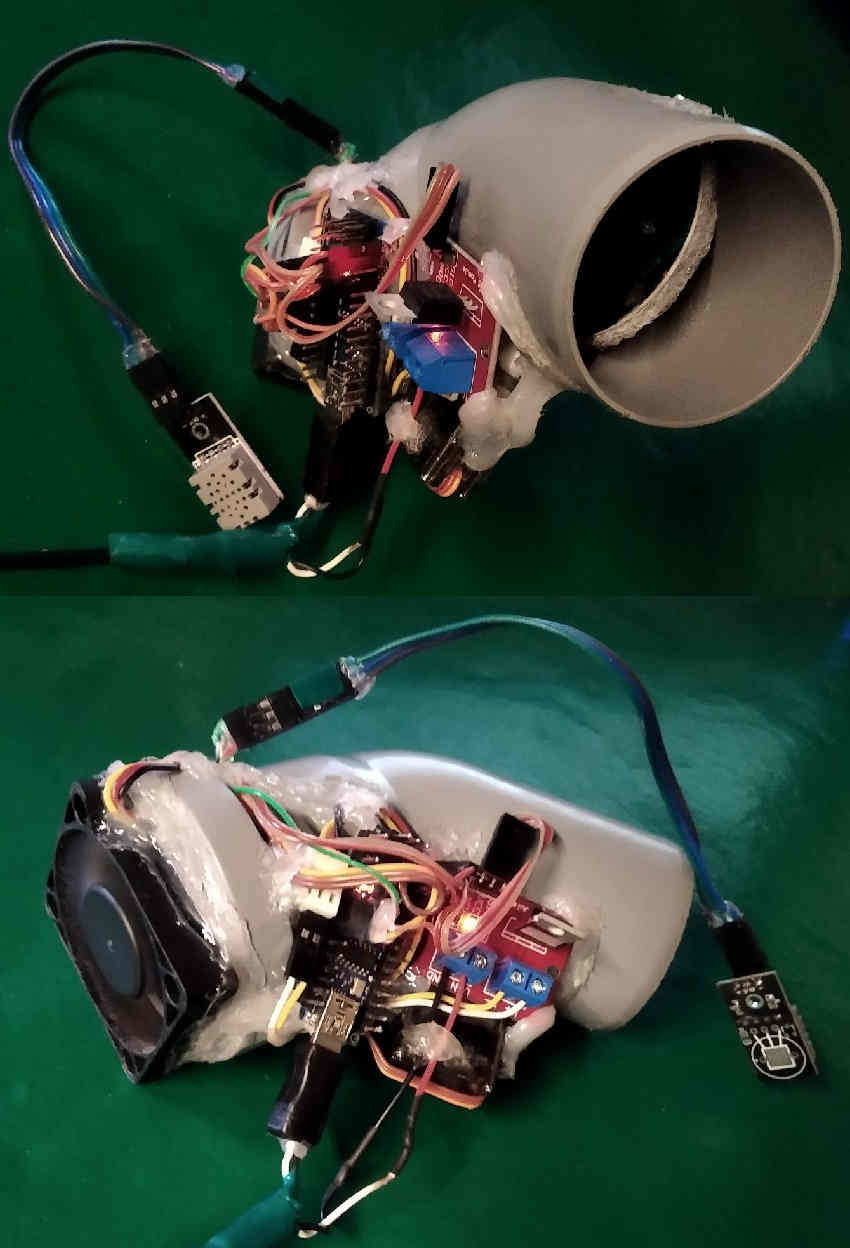
# fantube
|
||||
|
||||
Device that regulates fan speed and damper in the tube depending on temperature
|
||||
Device that regulates fan speed and damper in the tube depending on temperature
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
BIN
Binary file not shown.
+124
@@ -0,0 +1,124 @@
|
||||
#include <Thread.h>
|
||||
#include <Servo.h>
|
||||
#include <dht11.h> // https://github.com/adidax/dht11
|
||||
#include "HCMotor.h" // https://github.com/HobbyComponents/HCMotor/
|
||||
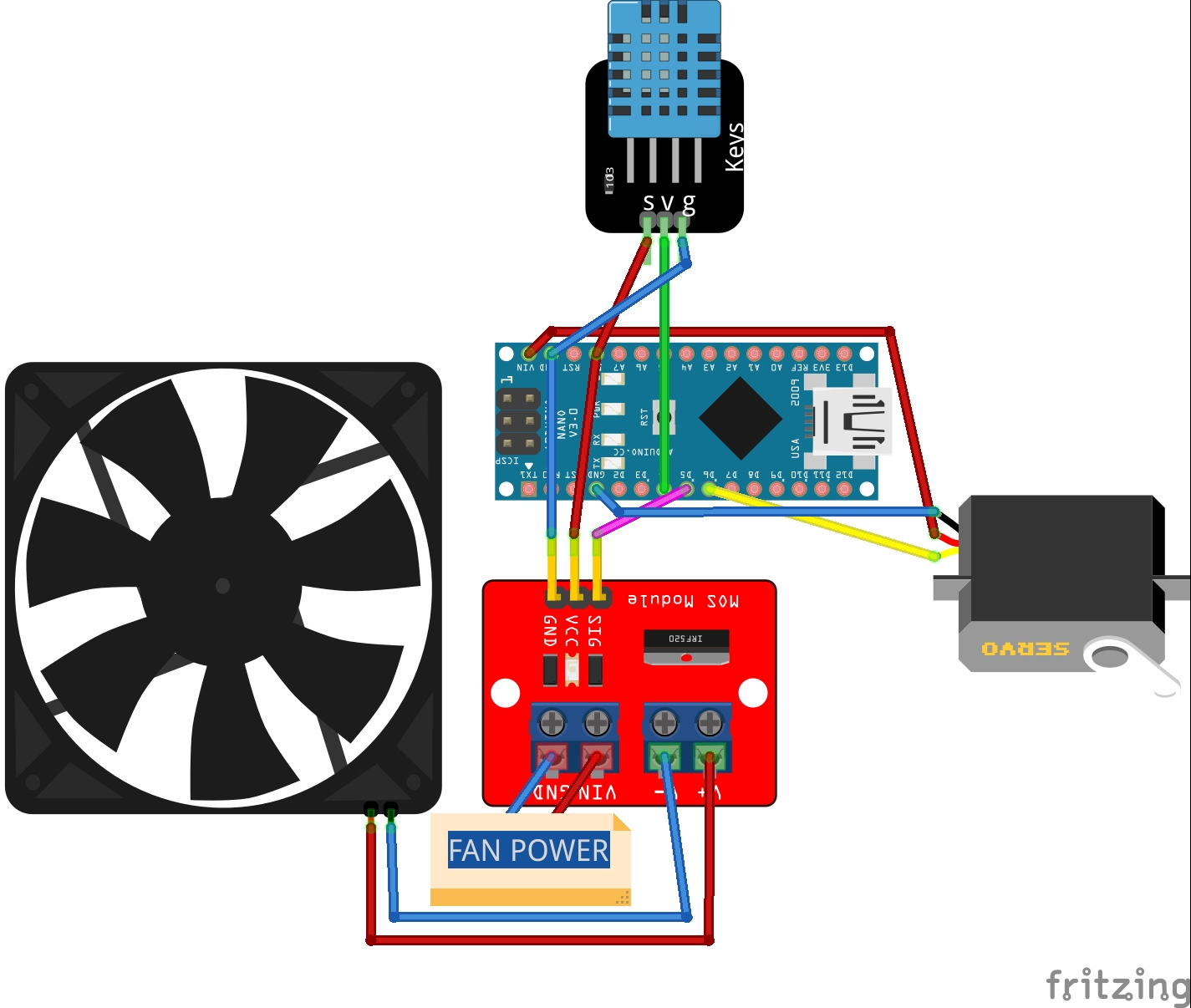
#define DHT11PIN 4 // DHT11 - PIN 4
|
||||
#define FANPIN 5 // IRF520 MOS Driver - PIN 5
|
||||
#define SERVOPIN 6 // Servo - PIN 6
|
||||
Servo myservo;
|
||||
HCMotor fan;
|
||||
dht11 DHT11;
|
||||
int currenttemp = 0;
|
||||
int currenthum = 0;
|
||||
int fanstatus = 0;
|
||||
int damperpos = 0;
|
||||
bool damperstatus = false; // false - damper closed; true - damper opened
|
||||
Thread checkSensorThread = Thread();
|
||||
Thread ledThread = Thread();
|
||||
|
||||
void setup() {
|
||||
Serial.begin(9600);
|
||||
pinMode(LED_BUILTIN, OUTPUT);
|
||||
digitalWrite(LED_BUILTIN, LOW);
|
||||
checkSensorThread.onRun(sensorDataCheck);
|
||||
checkSensorThread.setInterval(60000);
|
||||
ledThread.onRun(ledBlink);
|
||||
ledThread.setInterval(2000);
|
||||
fan.Init();
|
||||
fan.attach(0, DCMOTOR, FANPIN);
|
||||
fan.DutyCycle(0, 100); // min and max fan rotation
|
||||
delay(2222);
|
||||
sensorDataCheck();
|
||||
damperOpen();
|
||||
fanSpeed(0);
|
||||
}
|
||||
|
||||
void loop()
|
||||
{
|
||||
if (checkSensorThread.shouldRun())
|
||||
checkSensorThread.run();
|
||||
if (ledThread.shouldRun())
|
||||
ledThread.run();
|
||||
}
|
||||
|
||||
void sensorDataCheck()
|
||||
{
|
||||
sensorDataRead();
|
||||
serPrintHumTemp();
|
||||
if (currenttemp < 5) {
|
||||
if (damperstatus) damperClose(); // <5 - damper close
|
||||
} else if (!damperstatus) damperOpen(); // >4 - damper open
|
||||
if (currenttemp > 25) {
|
||||
if (currenttemp > 30) {
|
||||
if (currenttemp > 35) {
|
||||
if (currenttemp > 40) { fanSpeed(100); // >40 - fan full
|
||||
} else fanSpeed(75); // >35 - fan three quarters
|
||||
} else fanSpeed(50); // >30 - fan half
|
||||
} else fanSpeed(30); // >25 - fan third
|
||||
} else fanSpeed(0); // <26 - fan off
|
||||
}
|
||||
|
||||
void ledBlink() {
|
||||
static bool ledStatus = false;
|
||||
ledStatus = !ledStatus;
|
||||
digitalWrite(LED_BUILTIN, ledStatus);
|
||||
}
|
||||
|
||||
void sensorDataRead()
|
||||
{
|
||||
int chk = DHT11.read(DHT11PIN);
|
||||
currenthum = DHT11.humidity;
|
||||
if (currenthum == 0)
|
||||
{
|
||||
for (int i=0; i<=5; i++)
|
||||
{
|
||||
delay(111);
|
||||
chk = DHT11.read(DHT11PIN);
|
||||
currenthum = DHT11.humidity;
|
||||
if (currenthum > 0) i = 5;
|
||||
}
|
||||
}
|
||||
currenttemp = DHT11.temperature;
|
||||
}
|
||||
|
||||
void damperClose()
|
||||
{
|
||||
myservo.attach(SERVOPIN);
|
||||
delay(55);
|
||||
for (damperpos = 0; damperpos <= 90; damperpos += 1)
|
||||
{
|
||||
myservo.write(damperpos);
|
||||
delay(25);
|
||||
}
|
||||
delay(55);
|
||||
myservo.detach();
|
||||
damperstatus = false;
|
||||
}
|
||||
|
||||
void damperOpen()
|
||||
{
|
||||
myservo.attach(SERVOPIN);
|
||||
delay(55);
|
||||
for (damperpos = 90; damperpos >= 0; damperpos -= 1)
|
||||
{
|
||||
myservo.write(damperpos);
|
||||
delay(15);
|
||||
}
|
||||
delay(55);
|
||||
myservo.detach();
|
||||
damperstatus = true;
|
||||
}
|
||||
|
||||
void fanSpeed(int fanrate)
|
||||
{
|
||||
fan.OnTime(0, fanrate);
|
||||
fanstatus = fanrate;
|
||||
}
|
||||
|
||||
void serPrintHumTemp()
|
||||
{
|
||||
Serial.print("temp: ");
|
||||
Serial.print(currenttemp);
|
||||
Serial.print("; hum: ");
|
||||
Serial.println(currenthum);
|
||||
}
|
||||
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 60 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 356 KiB |
Reference in New Issue
Block a user